서보기구 (servomechanism)
 2017-05-18
2017-05-18
물체의 위치 · 방위 · 자세 등을 제어량(출력)으로 하고 목표값(입력)의 임의의 변화에 추종하도록 구성된 제어계.
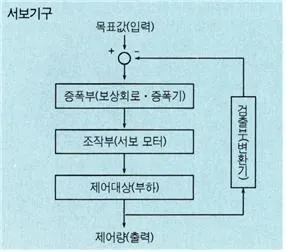
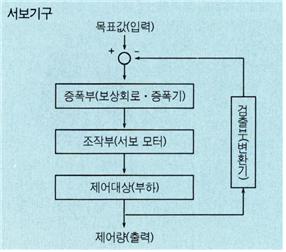
서보라는 명칭은 주인의 명령대로 충실하게 일하는 「노예」에서 유래한다. 서보기계는 공작기계의 제어, 계측기의 지시, 원격측정, 선박 · 항공기의 조종 등 공업기술의 광범위한 분야에서 이용되고 있다. 일반적으로 되먹임을 이용한 제어계이며 검출부 · 증폭부 · 조작부 · 제어대상으로 이루어져 있다. 이 밖에 안정성 및 제어기능의 향상을 위해 보상요소, 국부 되먹임이 이용된다.
일반적으로 서보기구에 대한 입력신호(목표값을 전압 · 전기압 등의 조작에 의해 편리한 물리량으로 변환하여 이용하는 수가 많다)가 가지고 있는 에너지는 작지만 증폭부에 의해 큰 에너지를 가지는 신호가 되고, 조작부 (서보모터 · 피스톤 실린더 등)를 구동하여 물체를 움직인다. 움직이는 물체의 실제 위치나 각도는 검출부에 의해 입력신호와 같은 물리량의 신호(되먹임 신호)로 변환되어 입력신호와의 비교가 이루어진다. 그 차이가 0이 될 때까지, 즉 목표값과 일치할 때까지 조작부가 구동되는 구조로 되어 있다.
서보기구를 분류하면 ① 서보모터의 종류에 따른 분류 : 전기서보 · 유압서보 · 전기-유압서보 · 공기압서보 등이 있다. ② 출력에 따른 분류 : 보통 100W 정도를 경계로 해서 그 이상의 것을 파워서보, 그 이하의 것을 계측서보로 분류한다. ③ 제어계 내의 신호의 특성에 따른 분류 : 직류서보 · 교류서보 · 아날로그서보 · 디지틀서보 등이 있다. 또 출력 쪽의 반응이 입력 쪽으로 되먹임되는 감각을 가진 쌍방향성(bilateral) 서보기구도 있다. 독자적으로 일정한 기능을 발휘할 수 있는 것이 보통이고, 이것을 주 프로그램으로 보고 여기서 또 제2의 서브루틴을 호출할 수도 있다.
서브루틴에는 열린 것과 닫힌 것이 있으며 열린 서브루틴은 앞뒤에 아무 것도 붙이지 않고도 필요한 곳에 반복 삽입할 수 있으며 닫힌 서브루틴은 그 앞뒤에 호출용 연결 부분이 붙어 있어서 프로그램의 필요한 곳에 호출 기호를 붙여 둠으로써 동작한다. 보통은 닫힌 서브루틴을 가리킨다.
- 다음
- 서스펜션 (suspension) 2017.05.18
- 이전
- 서미스터 체인 (thermistor chain) 2017.05.18

![공작 기계 국산화에 새바람 [#극찬기업]/ YTN 사이언스](/jnrepo/uploads/2021/08/공작-기계-국산화에-새바람-극찬기업.jpg)